PERSONAL PROJECTS HIGHLIGH
A.R.M.S.
Mixed reality warehouse manegement system
MORE
GYM-DOFBOT
A vision-friendly simulation environment for Yahboom DOFBOT based on bullet physics engine and OpenAI Gym
pip install gym-dofbot==0.1.1
MORE
GAIA System(ver. 1.0, 1.5 and 2.0)
An integrated tool for visualizing and managing natural disasters
Frontend in Three.js and HTML, CSS
Backend in Azure Cloud, Azure SQL, Google BigQuery
MORE
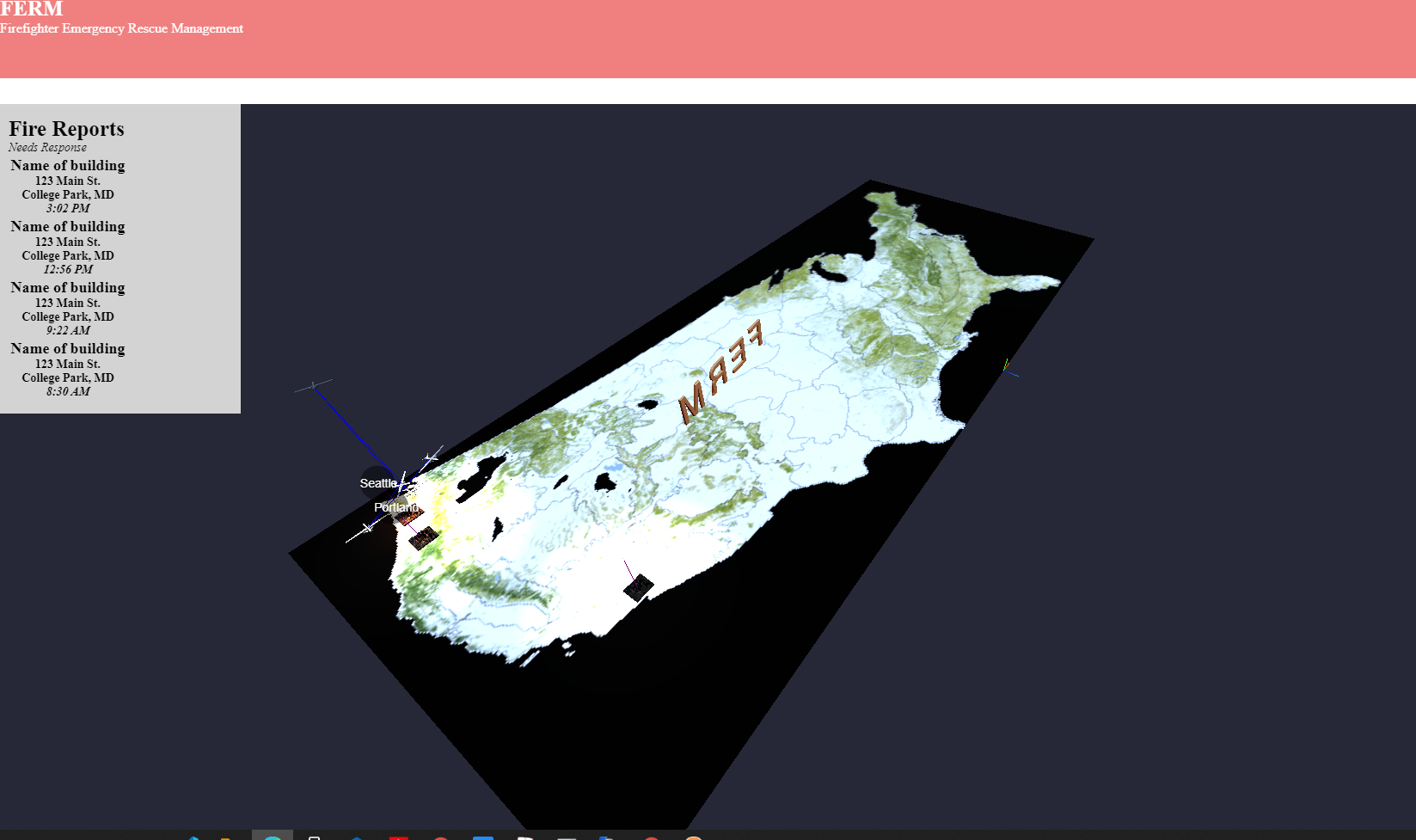
FERM(Firefighting-Emergency-Resource-Management)
A resource managing tool for allocating firefighting units
Frontend in Three.js and HTML, CSS
Backend in Azure Cloud, Azure SQL
MORE
![]()
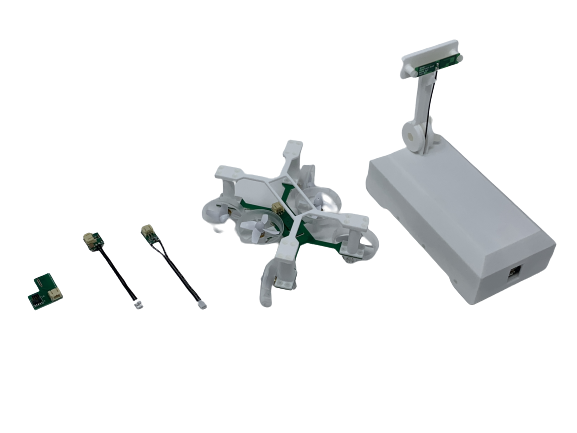
AdaEye
A next-generation navigation and cognitive package for visually impaired
An audio companion for blind people 🔊 Gimbal device as the “eye” 👁 and the iOS App the “companion” 👯♀️ GPT-3 based AI agent for chatting and complex problem solving🧠Voice only login, registration and navigation
Winner for Best Use of Google Cloud in MakeHarvard 2021
Built on Azure cloud VM with RabbitMQ, and Google Cloud Vision API for object detection and obstacle avoidance
MORE
![]()
Neomap
Share you new year resolutions, relive your memories, and create new ones with Neomap!
Take a picture or upload a screen shot and post it to view laterUse hand gestures to like, share or comment on a post
Firebase for user authentication and post retrieval
Winner for Best Use of Google Cloud and Radar.io most creative award in MLH New Year New Hack
MORE
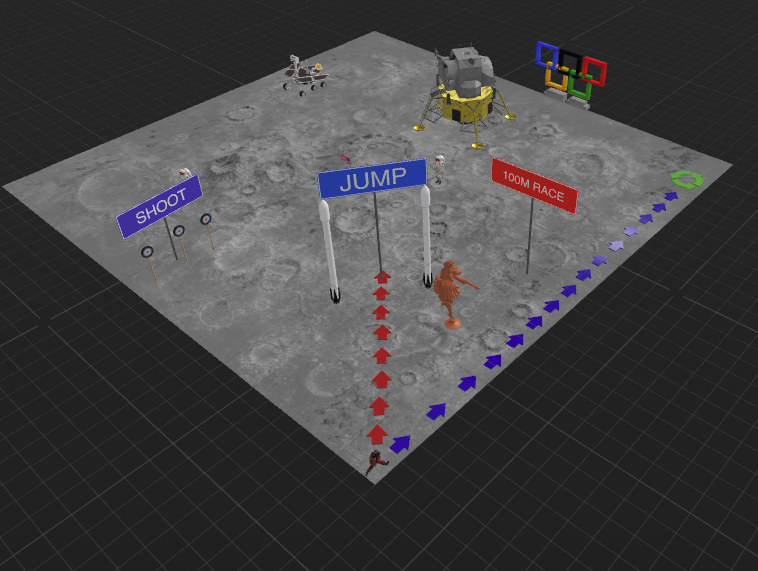
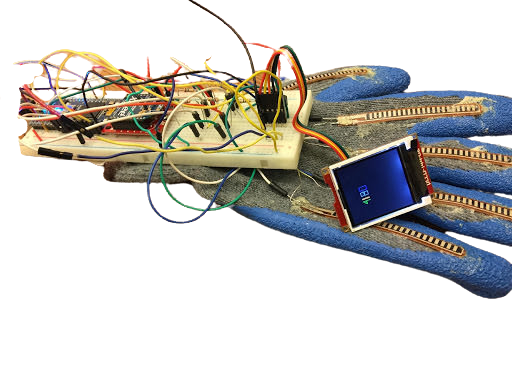
Lunar Olympics
Future Olympics Game Hosted on the Moon
Arduino Nano Sense for gesture control via BLE (Bluetooth Low Energy)Outdoor games hosted near Apollo landing site
Indoor games hosted inside Space-X Starship
Winner for The Open Innovation University Hackathon
MORE
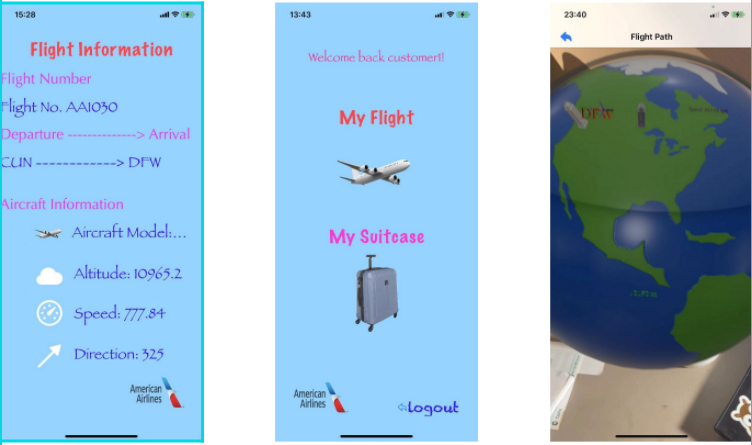
AlphaFly
A flight assistant that helps improve flight experience
Increasing transparency of flight informationLuggage tracking by camera/GPS/Bluetooth
MORE

VCart
A mixed reality remote shopping experience on your cell phone
Virtual shop experience with hand gestureAdd items to cart with grabbing actions
Order history synchronized to cloud
Check out by tapping
MORE
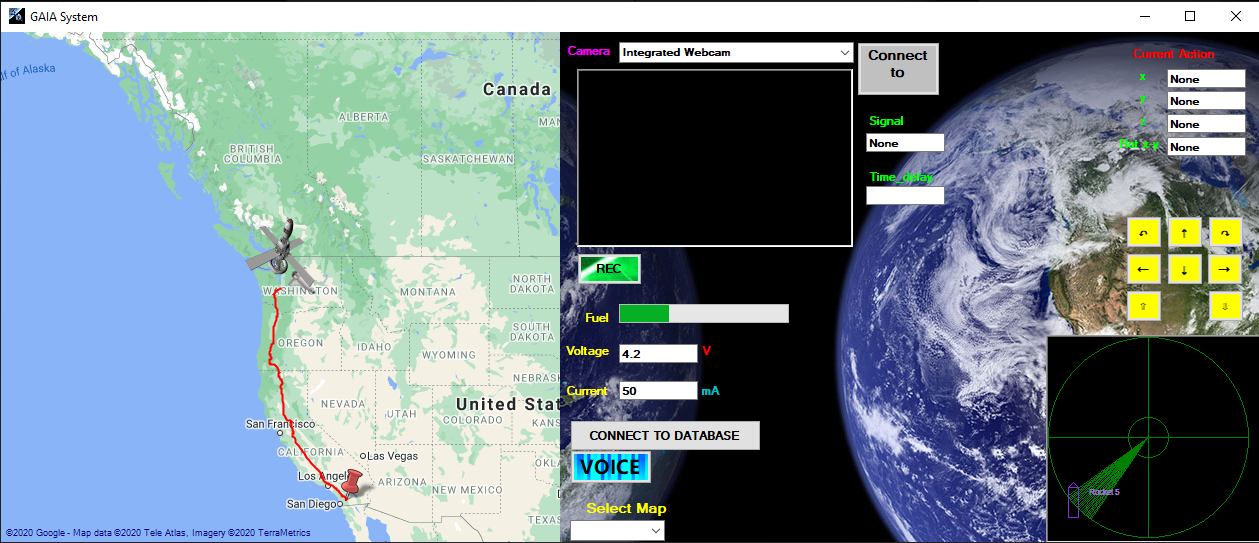
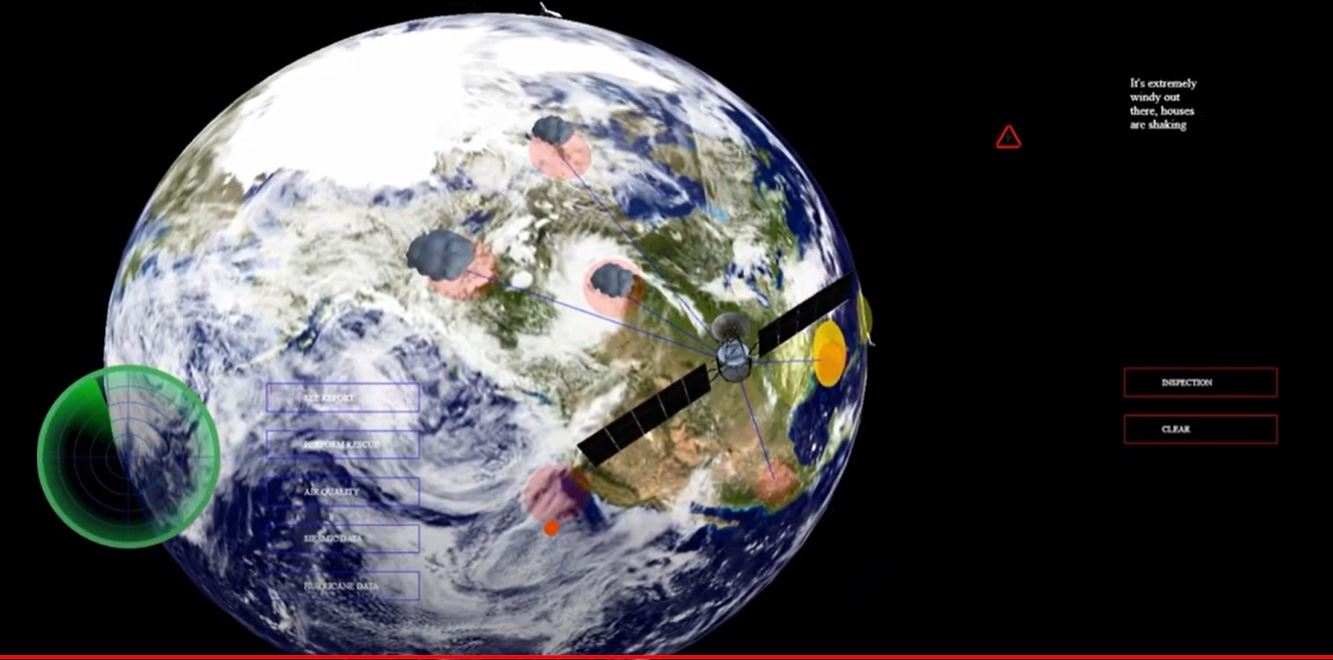
GAIA System
Countering Forest Fire with Aerospace Technology and Artificial Intelligence
Next-generation, voice-controlled GCS (ground control software)Satellites and GPS information visualization on the radar panel
Allows automatic lock of fire region by mouse clicks
YOLO network for real-time fire detection
MORE

X-Waves
An Augmented Reality(AR) solution for Tourette Syndrome using Magic leap
Neutralize tics in Tourette Syndrome by audio and visual distractionMORE